socp
语法
socp(f, [G], [h], [l], [q], [A], [b])
详情
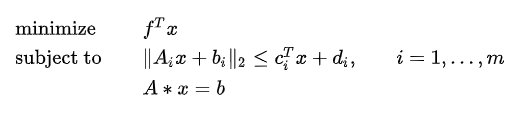
该函数用于求解二阶锥规划问题,计算目标函数在限定条件下的最小值。若其约束条件以标准形式给出,其形式如下:
则矩阵 G 为:

向量 h 为:

参数
二阶锥规划(Second-Order Cone Programming,SOCP)问题的约束条件形式如下:
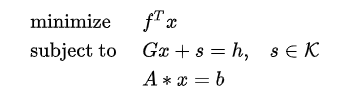
其中 K 为锥,s 为松弛变量,其值在优化过程中会被确定。
f 是数值型向量,表示目标函数的系数向量。
G 是数值型矩阵,表示锥约束的系数矩阵。
h 是数值型向量,表示锥约束的右端向量。
l 是整数标量,表示非负象限约束的维度。
q 是正数向量,表示各个二阶锥约束的维度大小,形式为 [r0,r1,…,rN-1]。
A 是数值型矩阵,表示等式约束的系数矩阵。
b 是数值型向量,表示等式约束的右端向量。
返回值
返回一个长度为 4 的元组:
- 第一个元素表示求解状态。
- 第二个元素是目标函数取最小值时 x 的取值。
- 第三个元素是目标函数的最小值。
- 第四个元素是整型标量,表示 Exitcode。
Exitcode 与状态描述的对应关系如下表:
| Exitcode | 状态描述 |
|---|---|
| 0 | Optimal solution found |
| 1 | Certificate of primal infeasibility found |
| 2 | Certificate of dual infeasibility found |
| 10 | Optimal solution found subject to reduced tolerances |
| 11 | Certificate of primal infeasibility found subject to reduced tolerances |
| 12 | Certificate of dual infeasibility found subject to reduced tolerances |
| -1 | Maximum number of iterations reached |
| -2 | Numerical problems (unreliable search direction) |
| -3 | Numerical problems (slacks or multipliers outside cone) |
| -7 | Unknown problem in solver |
例子
求解以下二阶锥规划问题:
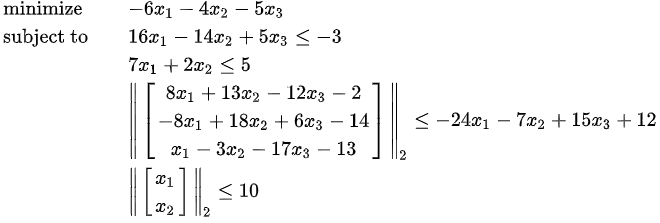
f = [-6, -4, -5]
G = matrix([[16, 7, 24, -8, 8, -1, 0, -1, 0],
[-14, 2, 7, -13, -18, 3, 0, 0, -1],
[5, 0, -15, 12, -6, 17, 0, 0, 0]])
h = [-3, 5, 12, -2, -14, -13, 10, 0, 0]
l = 2
q = [4,3]
re = socp(f,G,h,l,q, ,)
print(re)返回:("Optimal solution found",[-9.902804882871327,-1.39084684264198,26.211851780740154],-66.079042235904907,0)